Egy magyar Mars-rover születése
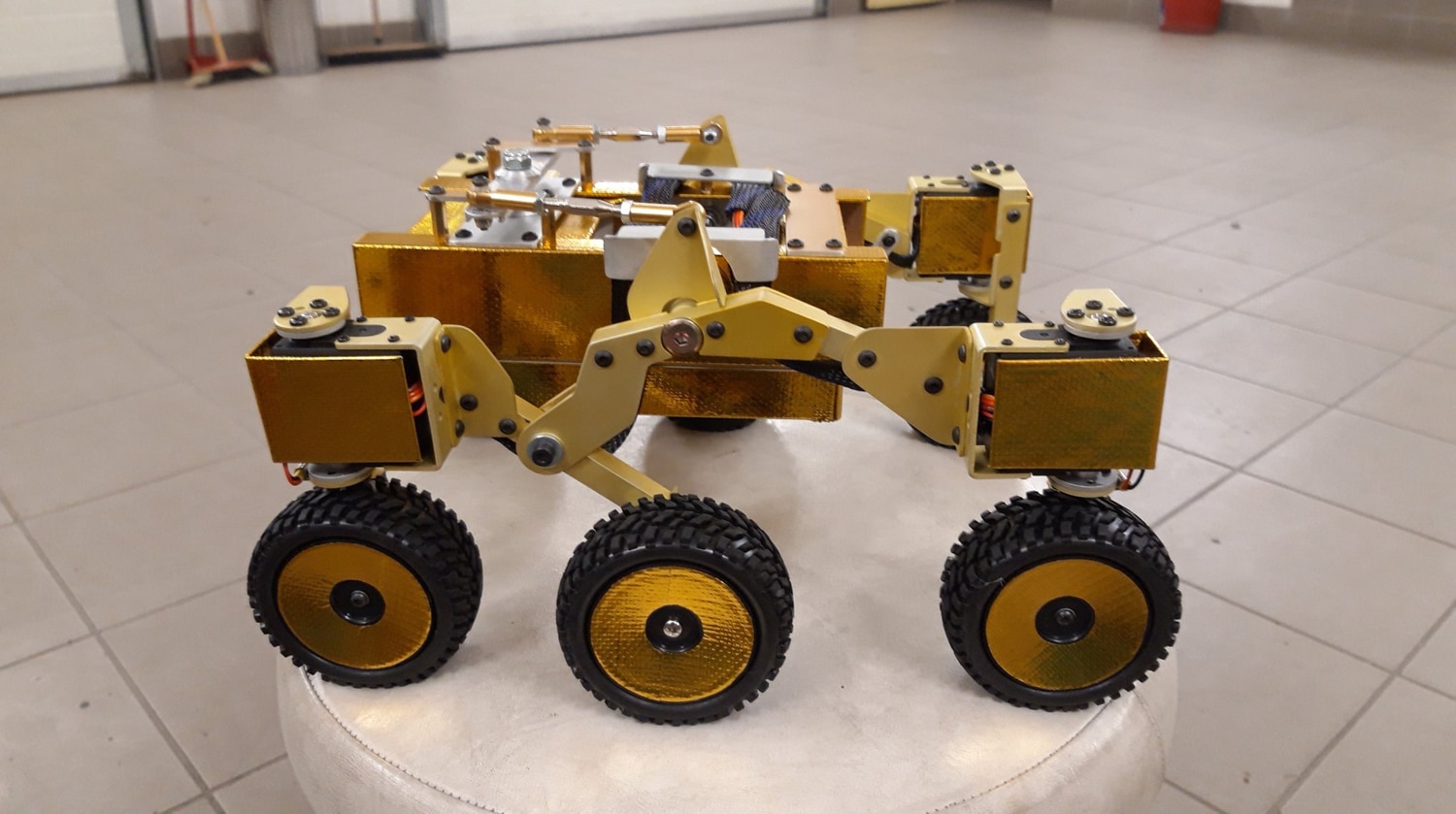
Szerző: Lerch Krisztián Mi a RECON? A RECON csupán egy koncepció, egy fantázia. Nem titkolt...
Olvass továbbVálassza az Oldal lehetőséget
készítette: Kovács Gergő | jan 23, 2020 | Mars, Planetológiai hírek-írások, Planetológiai írások, Űrszondák | 0
Szerző: Lerch Krisztián Mi a RECON? A RECON csupán egy koncepció, egy fantázia. Nem titkolt...
Olvass tovább